1. خلاصه
اجسام محرک کنورتر فرکانس پلتفرم حفاری عمدتاً وینچ ها، چرخ دارها و پمپ های گل هستند.
تجهیزات انتقال تبدیل فرکانس به طور کلی طرح اتوبوس مشترک DC را اتخاذ می کند. برای سیستم متصل به شبکه برق، واحد تنظیم کننده می تواند با بازخورد پیکربندی شود،و واحد ترمز متمرکز باید بر روی اتوبوس DC تنظیم شود اگر نمی تواند بازخورد شود.
وینچ پلت فرم حفاری دارای ویژگی های بار مشابه با استفاده از بلند کردن است که نیاز به اینورتر دارد که کنترل بردار حلقه باز / بسته، چرخش بزرگ شروع،عملکرد پرتاب صفر سرعتو برای پلتفرم چاه عمیق، ممکن است شامل یک کنترل همزمان استاد و چندین غلام باشد.
صفحه چرخش دستگاه نیاز به محدود کردن گشتاور دارد تا مانع از شکستن گشتاور یا قطعات شود.

2.برنامه محرک تبدیل فرکانس
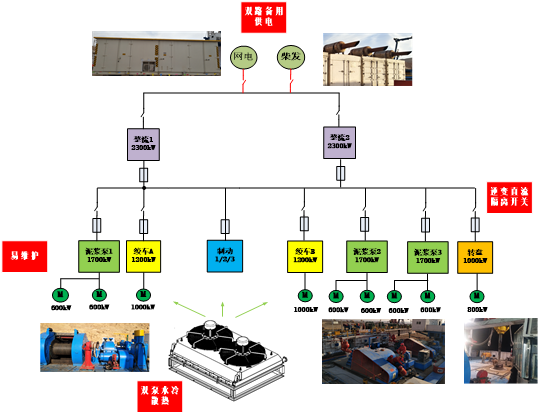
سیستم حفاری نفتی از کنورتر فرکانس خنک شده با آب سری HD2000 استفاده می کند ، ترکیب سیستم شامل: سیستم تامین برق ، دو واحد تنظیم کننده 2.3MW ، سه واحد پمپ گل 1.7MW ، دو 1.واحد های لیوان 2MW، یک واحد چرخ دار 1MW، سه واحد ترمز مرکزی 1.2MW، سیستم خنک کننده آب، موتورهای مربوط به هر واحد اینورتر و مقاومت های ترمز خارجی.واحدهای قدرت واحد وینچ و واحد چرخ دار با یک قدرت نامی 1 طراحی شده اند.4 مگاوات
از جمله آن ها:
1. کل سیستم می تواند توسط شبکه برق یا ژنراتور دیزل در محل تغذیه شود
2. دو واحد اصلاح کننده و تمام واحد های اینورتر، واحد های ترمز مشترک بس
3. سه واحد ترمز در یک کابینت واحد
4. سه پمپ لجن می تواند دو، یعنی با دو موتور 600kW هم محوری در حال اجرا در موازی کشیده می شود؛
5. وینچ A و وینچ B در حالت master-slave کار می کنند
6. وينچ و دوربين داراي ماژول کدهاي کد هستند
7سیستم خنک کننده آب یک سیستم پمپ دوگانه را اتخاذ می کند و پمپ گردش را می توان به صورت خودسرانه در طول کار انتخاب کرد.
توپولوژی سیستم به شرح زیر است:
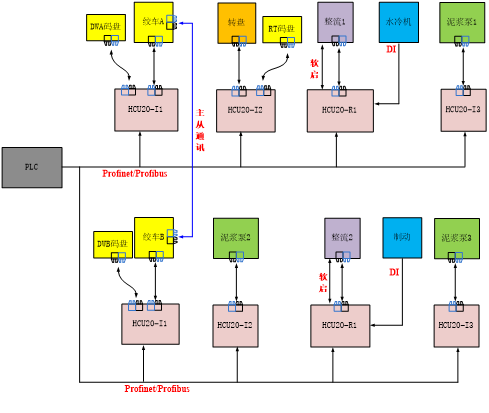
تبدیل فرکانس چند انتقال خنک شده با آب در حفاری نفت از 8 کنترل کننده HCU20 برای کنترل مستقل واحدهای تنظیم کننده و اینورتر استفاده می کند.اطمینان از قابلیت اطمینان عملکرد سیستم، و انتقال ارتباط و سیگنال وضعیت با کنترل اصلی PLC، خنک کننده آب، ترمز و دیسک کد را تحقق می بخشد.
از جمله آن ها:
1. ارتباطات بین کنترل اصلی PLC و هر HCU20 می تواند انتخاب Profinet اتوبوس یا Profibus اتوبوس
2. حالت کنترل استاد-غلام بین وینچ A و وینچ B تحقق می یابد
3کابینت خنک شده با آب می تواند به صورت محلی کنترل شود یا از راه دور توسط کنترل کننده تنظیم کننده 1 کنترل شود.
4واحد ترمز ارتباط با کنترل کننده ی راستگر 2 را برقرار می کند و اطلاعات وضعیت واحد ترمز می تواند به کنترل کننده ی راستگر 2 منتقل شود.یا تنظیم مجدد خطای واحد ترمز می تواند از طریق کنترل کننده اصلاح کننده 2 تحقق یابد;
5. پمپ لجن در حالت VF کار می کند ، وینچ و چرخ دار در CLVC کار می کنند (با کنترل بردار صفحه کد) ؛
6هر کنترل کننده HCU20 مجهز به رابط های سیگنال AI، AO، DI و DO برای پشتیبان گیری است.
توپولوژی سیستم کنترل به شرح زیر است: